Menü Übersicht
Unsere Themenwelten



Characteristic
Additional axes (peripherals) for the standard robot
Application
Use of turntables and stages
Benefits
Central control, can also be used for exte
Characteristic
Mechanically linked Y-axes on a shared X-axis
Application
Simultaneous demolding or placement process in the mold
Benefits
Save time

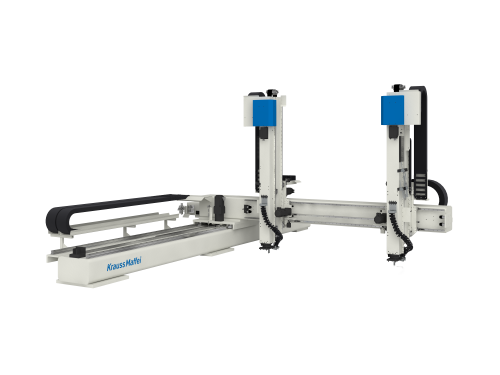
Characteristic
Mechanically linked X-axes on a shared Z-axis
Application
Transfer of components (handshake) during rapid component removal or stacking operations
Benefits